 "Pin It")
Evet, thread ile ilgili yazılarımıza devam etme zamanı geldi. Bu yazımda, sizlere thread kütüphanesi içerisinde bulunan ve C++ kullanarak multithreaded yazılım geliştirme esnasında, size faydası dokunacağını düşündüğüm yapılardan bahsedeceğim. Thread kütüphanesi ve ilgili girizgahı bir önceki yazımda yapmıştım, eğer onu okumadıysanız, mutlaka okumanızı öneririm. Aşağıda ilgili yazıma ve serinin diğer yazılarına ilişkin bağlantıları bulabilirsiniz:
Haftalık C++ 7- std::thread (I)
Haftalık C++ 8- std::thread (II)
Haftalık C++ 10- std::thread (III)
Aslında, ilk etapta, senkronizasyon yapılarından da bahsetmeyi planlıyordum fakat daha sonra bu yazıyı sadece yardımcı yapılarak ayırıp, senkronizasyon yapıları için ayrı bir yazı yazmaya karar verdim. Öbür türlü, yazıyı takip etmek ve bütünlüğü korumak gerçekten zor olacaktı. Bu yazımda sizlere aktaracağım konular ise: async, futures, promises, packaged_tasks ve son olarak atomics veri yapıları. Evet hadi o zaman, başlayalım.
std::async:
async ‘<future>‘ kütüphanesi tarafından farklı prototipleri sunulan, bağımsız şablon bir fonksiyondur (template function). Bu fonksiyonlar, parametre olarak geçirilen fonksiyonları asenkron olarak koşturup (bu genelde ayrı bir thread oluşturularak ve koşturulması ile sağlanır, ama geliştirici bundan soyutlanır), sonucu ve koşum durumunu std::future nesnesi (birazdan açıklayacağım) olarak dönerler. Aslında görebileceğiniz üzere, bu yapı, basit thread kullanım ihtiyaçlarınızı gidermek için geliştirilmiş bir üst seviye yapı olarak değerlendirilebilir. Diğer bir deyişle, bu metot kullanarak yapacağınız herhangi bir işi Thread kütüphanesinin diğer yapılarını da kullanarak yapabilirsiniz.
Tahmin edebileceğiniz üzere, bu metotlara, fonksiyon, fonksiyon işaretçisi, fonksiyon nesnesi ve lambda fonksiyonlarını, ihtiyaç duydukları parametreleri ile birlikte geçirebilirsiniz. Bu parametreleri de async() metotlarına parametre olarak geçirebilirsiniz. İlgili metodun dokümantasyonun verilen aşağıdaki örnek kod, aslında bu kullanımları güzel bir şekilde özetliyor:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
#include <iostream> #include <vector> #include <algorithm> #include <numeric> #include <future> template <typename RandomIt> int parallel_sum(RandomIt beg, RandomIt end) { auto len = end - beg; if (len < 1000) return std::accumulate(beg, end, 0); RandomIt mid = beg + len/2; auto handle = std::async(std::launch::async, parallel_sum<RandomIt>, mid, end); int sum = parallel_sum(beg, mid); return sum + handle.get(); } int main() { std::vector<int> v(10000, 1); std::cout << "The sum is " << parallel_sum(v.begin(), v.end()) << '\n'; } |
Bu fonksiyon ve parametreler yanında async metodu, bir de çalıştırma politikası denile ve üç farklı değer alan bir parametre de kabul etmektedir:
- std::launch::async
- Verilen iş asenkron olarak, farklı bir thread içerisinde koşturulur.
- std::launch::deferred
- Verilen iş dönülen std::future nesnesinin get() metodu çağrıldığında koşturulur.
- std::launch::async | std::launch::deferred
- Varsayılan parametre budur. Bu parametre değeri geçirildiği durumda, sistemin mevcut yüküne göre: senkron ya da asenkron çağrılabilir. Geliştiricinin bunun üzerinde kontrolü yoktur.
async() kullanımını daha iyi anlamanıza yardımcı olacağını düşündüğüm bir örnek kod daha ekliyorum (alıntıladığım kaynağa da referanslardan ulaşabilirsiniz):
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 |
#include <string> #include <chrono> #include <thread> #include <future> using namespace std::chrono; std::string fetchDataFromDB(std::string recvdData) { // Bu metodun tamamlanmasının 5 saniye süreciğini garantile std::this_thread::sleep_for(seconds(5)); // Bu sırada veri tabanı bağlantısı ya da veri odaklı işleri halledebiliriz return "DB_" + recvdData; } std::string fetchDataFromFile(std::string recvdData) { // Bu metodun tamamlanmasının 5 saniye süreciğini garantile std::this_thread::sleep_for(seconds(5)); // Bu sırada veri odaklı işleri halledebiliriz return "File_" + recvdData; } int main() { // Başlangıç zamanını tutualım system_clock::time_point start = system_clock::now(); // Aşağıdaki kullanımda toplam süreyi 5 saniyeye indiriyoruz std::future<std::string> resultFromDB = std::async(std::launch::async, fetchDataFromDB, "Data"); // Aşağıdaki kullanımda ise 10 sn bir süre geçiyor // std::string dbData = fetchDataFromDB("Data"); // Dosyadan veriyi çekelim std::string fileData = fetchDataFromFile("Data"); // Veri tabanın veriyi çekelim // future<std::string> object nesnesi hazır olana kadar bloklar. std::string dbData = resultFromDB.get(); // Bitiş zamanını alalım auto end = system_clock::now(); auto diff = duration_cast < std::chrono::seconds > (end - start).count(); std::cout << "Total Time Taken = " << diff << " Seconds" << std::endl; // Verileri birleştirelim std::string data = dbData + " :: " + fileData; // Birleştirilmiş veriyi basalım std::cout << "Data = " << data << std::endl; return 0; } |
Bu arada, yukarıda verdiğim örnekte dikkat etmenizi istediğim nokta std::future nesnesine ilişkin get() API’sinin çağrıldığı zaman mevcut thread’i verilen iş tamamlanıncaya kadar bloklamasıdır. Bunun yanında, std::async() metodundan dönülen std::future nesnesinin yıkıcısı çağrıldığında da, benzer şekilde mevcut thread bloklanır. Aşağıda buna ilişkin bir kullanım gösterdim:
|
1 2 3 4 5 6 |
// Sample from Scott Meyers' Blog void f() { std::future<void> fut = std::async(std::launch::async, [] { /* compute, compute, compute */ }); } |
Bunun ile ilgili daha detaylı bilgilere Scott Meyers’in sayfasından ulaşabilirsiniz: Scott’s blog post.
Şimdi, std::future’a bakma zamanı.
std::future & std::promise:
C++11 thread kütüphanesi ile gelen bir diğer yapı da std::future sınıfıdır. Bunun kullanmak için ‘<future>’ başlık dosyasını kaynak kodunuza eklemeniz gerekiyor. Bu yapı, yukarıda gördüğünüz gibi async() metodu yanında std::packaged_task ve std::promise yapıları ile de kullanılmaktadır. Peki ne yapar bu sınıf? Bu sınıfın temel işlevi, kısaca async() metodu gibi thread koşumlarında, ilgili değerlerin dönülmesine sağlamaktır.
Geleneksel olarak, thread’ler arasında veri paylaşımını gerçekleştirmek için, mutex ve benzeri thread senkronizasyon yapılarını kullanmanız gerekmektedir. Dahası, gerçekleştirilen bu işlem sonrasında, çağıran sınıfı haberdar etmek için de std::conditional_variable tarzı yapıları da kullanmanız gerekebiliyor. std::future, bu tarz temel ihtiyaçları gidermek için sunulan bir sınıf. Bu sınıf, cağrılan thread tarafından sağlanacak olan veriyi tutar ve ilgili çağıran buna erişmesi için gerekli olan alt yapıları geliştiriciye sunmadan kotarır. Ne zamanki, çağıran sınıf std::future nesnesine ilişkin get() API’sini çağırır, o zaman ilgili iş bitene kadar bu thread bloklanır ve verilen iş bitince de ilgili değer dönülür.
Bu sınıfa benzer şekilde, std::promise sınıfı da aslında std::future ile dönülecek bir değer için söz olarak kabul edilebilir. Bir diğer deyişle, her bir std::promise nesnesi ile ilintili bir std::future nesnesi bulunur ve bu ilgili değeri çağırana sağlar. Peki std::promise‘in buradaki kullanımı nedir? std::promise nesnesi, std::future nesnesi ile birlikte paylaştığı verinin, ilgili thread içerisinde atanması için gerekli arayüz sunar. Bu kadar açıklamanın biraz kafa karıştırıcı olabileceğinin farkındayım, yine referanslarda verdiğim bir kaynakta buraya koyduğum aşağıdaki figür, bu iki nesne arasındaki ilişki ve kullanımlarını çok güzel özetliyor:
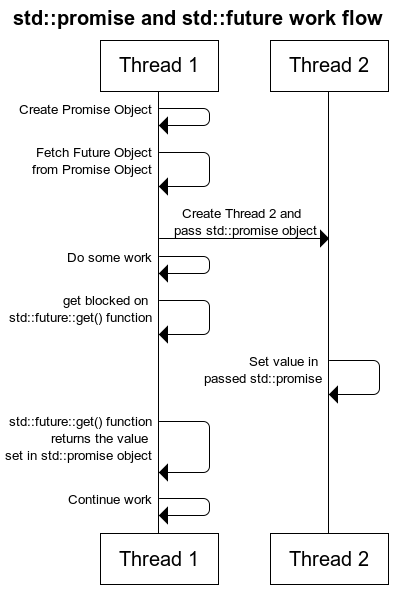
Burada std::promise nesnesi aslında arkada iki thread arasında paylaşılacak olan veriyi ifade/temsil ediyor. std::future nesnesi ise bu std::promise nesnesi üzerinden dönülecek değeri temsil ediyor. Genel kullanımı baktığımız zaman, ilgili threadi oluşturan, öncelikle bir std::promise nesnesi oluşturuyor ve buna ilintilendirilmiş bir ya da daha fazla std::future nesnesini ediniyor. Daha sonra std::promise nesnesini, oluşturacağı yeni thread’e geçiriyor ve yeni thread bu nesne üzerinden paylaşılacak olan veriyi atıyor ya da hata durumunu iletiyor. Bu aşamada, std::future nesneleri üzerinden ilgili dönüş değerinin atanıp/atanmadığı ya da bir hata olup olmadığı sorgulanabilmektedir. Aşağıda bu iki sınıfın ilişkisini gösteren kod parçasını görebilirsiniz:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
#include <iostream> #include <thread> #include <future> #include <chrono> using namespace std::chrono_literals; void initialize(std::promise<int> && promObj) { std::cout << "Update the value represented by passed promise as 65" << '\n'; // 5 sn bekletelim std::this_thread::sleep_for(5s); // Çağrılan thread dönülecek olan değeri bunun üzerinden iletir. Burada promObj.set_exception() aracılığı ile ya da aşağıdaki // kodu yorumlayarak hata durumu oluşturabilirsiniz promObj.set_value(65); } int main() { std::promise<int> promiseObj; std::future<int> futureObj = promiseObj.get_future(); // İlgili std::promise nesnesini yeni oluşturulan threade geçirelim std::thread th(initialize, std::move(promiseObj)); std::cout << "Wait till task is completed (about 5 seconds)" << '\n'; // Oluşturulan thread işini bitene kadar, mevcut thread bloklanır std::cout << futureObj.get() << std::endl; // Oluşturulan thread tamamlanana kadar bekle th.join(); return 0; } |
Eğerü std::promise nesnesi, ilgili dönüş değeri çağrılmadan silinirse ve de oluşturan thread, std::future nesnesi üzerinden get() API’sini çağırır ise, hata durumu oluştur. Bunun yanında bir diğer kullanım ile birlikte, birden fazla std::promise nesnesini oluşturulan thread’lere geçirerek, çağıran sınıf bunlara ilişkin std::future nesnelerinden ayrı ayrı değerler elde edilebilir.
Bu iki yapıya ilişkin güzel bir açıklama da Rainer Grim tarafından şu yazıda verilmiş durumda. Özetleyecek olursak:
std::promise nesnesi:
- Bir değer dönülmesine, hata durumu belirlenmesine ya da bilgilendirme yapılmasına olanak sağlar.
std::future nesnesi:
- std::promise nesnesinden ilgili değerlerin çekilmesine,
- std::promise nesnesine, ilgili değerin hazır olup/olmadığının sorulmasına,
- std::promise nesnesi üzerinden ilgili işlemin bitmesinin beklenmesine,
- std::shared_future oluşturulmasına olanak sağlar.
Bu iki yapının kullanımına ilişkin bir diğer örnek koda göz atalım:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |
// promiseFuture.cpp #include <future> #include <iostream> #include <thread> #include <utility> void product(std::promise<int>&& intPromise, int a, int b) { intPromise.set_value(a*b); } struct Div { void operator() (std::promise<int>&& intPromise, int a, int b) const { intPromise.set_value(a/b); } }; int main() { int a= 20; int b= 10; std::cout << '\n'; // İlgili std::promise nesnelerini oluşturalım std::promise<int> prodPromise; std::promise<int> divPromise; // Bunlardan std::future nesnelerini çekelim std::future<int> prodResult= prodPromise.get_future(); std::future<int> divResult= divPromise.get_future(); // Hesaplamaları ayrı bir thread'ten çekelim std::thread prodThread(product,std::move(prodPromise),a,b); Div div; std::thread divThread(div,std::move(divPromise),a,b); // Sonuçları toplayalım std::cout << "20*10= " << prodResult.get() << '\n'; std::cout << "20/10= " << divResult.get() << '\n'; prodThread.join(); divThread.join(); std::cout << '\n'; } |
std::future sınıfına benzer bir diğer sınıf da std::shared_future sınıfı. Bu sınıfın işlevini galiba en iyi dokümantasyonundaki (std::shared_future API dokümantasyonu) aşağıdaki tanım özetliyor:
std :: shared_future sınıf şablonu, gerçekleştirilecek olan bir işlemin dönüş değerine birden fazla thread’in erişmesine ve ilgili değerin için bekletilmesine olanak sağlar. std::future’dan farklı olarak (sadece taşınarak aktarılabilir), bu nesneler kopyalanabilir ve her bir kopya aynı ortak değere erişirler. Yalnızca hareketli olan std :: future’nin aksine (bu nedenle yalnızca bir örnek, herhangi bir zaman uyumsuz sonuca işaret edebilir), std :: shared_future kopyalanabilir ve birden çok paylaşılan gelecek nesnesi aynı paylaşılan duruma başvurabilir. Aslında, bir shared_future, std :: condition_variable :: notify_all ()’a benzer şekilde, aynı anda birden fazla iş parçacığına sinyal vermek için kullanılabilir. Bu sınıf, bir bakıma, birden fazla thread’i, std::condition_variable::notify_all() API’si gibi, haberdar etmek için kullanılabilir.
Hemen nasıl kullanıldığına örnek bir kod üzerinden bakalım:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 |
#include <iostream> #include <future> #include <chrono> int main() { // İlgili std::promise nesneleri std::promise<void> ready_promise, t1_ready_promise, t2_ready_promise; // İlgili threadlere paylaştırılacak olan std::shared_future nesnesi std::shared_future<void> ready_future(ready_promise.get_future()); std::chrono::time_point<std::chrono::high_resolution_clock> start; // Birinci lambda fonksiyonu auto fun1 = [&, ready_future]() -> std::chrono::duration<double, std::milli> { // ana (main) thread'i haberdar et t1_ready_promise.set_value(); // ana (main) thread'ten haber bekliyor ready_future.wait(); return std::chrono::high_resolution_clock::now() - start; }; // İkinci lambda fonksiyonu auto fun2 = [&, ready_future]() -> std::chrono::duration<double, std::milli> { // ana (main) thread'i haberdar et t2_ready_promise.set_value(); // ana (main) thread'ten haber bekliyor ready_future.wait(); return std::chrono::high_resolution_clock::now() - start; }; // İlgili std::promise nesnelerinden std::future nesnelerini çekelim auto fut1 = t1_ready_promise.get_future(); auto fut2 = t2_ready_promise.get_future(); // Thread'leri başlatalım auto result1 = std::async(std::launch::async, fun1); auto result2 = std::async(std::launch::async, fun2); // Threadlerden haber bekleyelim fut1.wait(); fut2.wait(); // Threadler hazırmış start = std::chrono::high_resolution_clock::now(); // Şimdi bekleyen thread'leri haberdar edelim ready_promise.set_value(); std::cout << "Thread 1 received the signal " << result1.get().count() << " ms after start\n" << "Thread 2 received the signal " << result2.get().count() << " ms after start\n"; return 0; } |
std::packaged_task:
std::future, promise ve async ile ilintili bir diğer sınıf da std::packaged_task<> sınıfı. Bu sınıf, asenkron olarak çağrılabilecek olan işlevleri temsil eder, async() metodu ise direk başlatıyordu hatırlarsanız (birazdan sekme sekme farkları da ifade edeceğim). İlgili işlevlerin dönüş değerleri veya hata durumları yine aynı nesne içerisinde tutulur ve std::future nesneleri üzerinden erişilir. Bu sınıf aşağıdakileri kapsar:
- Çağrılabilir birimleri ki bunlar bağımsız bir fonksiyon, fonksiyon işaretçisi, lambda fonksiyonu ya da fonksiyon nesnesi,
- İlgili çağrılabilir birimlere ait dönüş değeri veya hata durumlarının saklandığı veri.
Burada ilgili std::packaged_task nesnesinden elde edeceğiniz std::future nesnesi ile ilgili işlevden dönülen değere ve hata durumuna bakabilirsiniz. Aşağıda bu sınıfın kullanımına ilişkin örnek bir kod bulabilirsiniz:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 |
#include <iostream> #include <cmath> #include <thread> #include <future> #include <functional> // Sayının üssünü hesaplama için örnek fonksiyon int f(int x, int y) { return std::pow(x, y); } void taskLambda() { // packaged_task nesnesi lambda fonksiyonu ile std::packaged_task<int(int,int)> task([](int a, int b) { return std::pow(a, b); }); // Sonuç kontrol etmek için future nesnesini edinelim std::future<int> result = task.get_future(); // İşlevi başlatalım task(2, 9); // Sonuç için bekleyelim std::cout << "taskLambda:\t" << result.get() << '\n'; } void taskBind() { // packaged_task metot bağlama kullanımı std::packaged_task<int()> task(std::bind(f, 2, 11)); std::future<int> result = task.get_future(); // İşlevi başlatalım task(); std::cout << "taskBind:\t" << result.get() << '\n'; } void taskThread() { // packaged_task standart fonksiyon ile kullanımı std::packaged_task<int(int,int)> task(f); std::future<int> result = task.get_future(); // İlgili threade std::packaged_task nesnesini geçirelim ve işlevi başlatalım std::thread task_td(std::move(task), 2, 10); // Threadin tamamlanmasını bekleyelim task_td.join(); std::cout << "taskThread:\t" << result.get() << '\n'; } int main() { taskLambda(); taskBind(); taskThread(); return 0; } |
Yukarıdaki örnekten de göreceğiniz üzere std::packaged_task nesnelerini kopyalayamazsınız, sadece taşıyabilirsiniz. Bu sebeple, ilgili nesne, threadlere geçirilmeden önce genelde, std::future nesnesi tutulur (thread e ilgili std::packaged_task nesnesi taşınacağı için elimizde bir kopya kalmaz).
Gelelim sadede, packaged_task ile async metodu arasındaki fark ne peki? Güzel bir soru? Bu farkları kısaca aşağıdaki gibi özetleyebiliriz:
- İlk olarak, async çağrısı ile ilgili işlev hemen başlatılır, fakat std::packaged_task durumunda kontrol sizdedir. Ne zaman başlat API’sini çağırırsanız o zaman başlar,
- std::packaged_task nesnesinde elde edeceğiniz std::future nesnesine ait get() API’sini çağırmadan, ilgili std::packaged_task işlevini başlatmış olmalısınız. Yoksa uygulamanız sonsuza kadar takılı kalır,
- async metodunda ilgili işlevin hangi thread’te çağrılacağını belirleyemezsiniz. Fakat, std::packaged_task nesneleri farklı thread’lere aktarılarak orada çalıştırılabilir,
- Aslında async() arka tarafta std::packaged_task mekanizmasını kullanıyor gibi düşünebilirsiniz. std::packaged_task biraz daha alt seviye bir özellik ve async’in yaptığı iş std::thread ve std::packaged_task kullanılarak gerçekleştirilebilir.
Evet sstd::packaged_task konusu da bu kadar.
Atomics:
Bir önceki yazımı okuduysanız, multithreaded programlama da dikkat etmeniz gereken en önemli konulardan birisi de thread’ler arası paylaşılan verilerin korunmasıdır. Bu anlamda thread kütüphanesinde, bir sonraki thread yazımda da anlatacağım üzere, bir çok yapı bulunmakta. Bu yazımda ise thread kütüphanesi ile gelen ve basit veriler için bu tarz yapılardan bizi kurtaran bir yapıdan bahsedeceğim. Bunlar: Atomik Tiplerdir. İlgili referans (std::atomic library referans sayfası) sayfasında da ifade edildiği üzere bu yapılar, içerisinde barındırdığı veri tiplerine, bir çok thread’in erişimine herhangi bir “data race” ya da problem olmadan, senkronize bir şekilde erişimini sağlarlar. Daha fazla detaya girmeden önce hemen örnek bir kod üzerinden geçelim:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |
class ShredCounter { public: void increment() { ++mValue; } void decrement() { --mValue; } int get() { return mValue } void set(int newValue) { mValue = newValue; } private: // Paylaşılacak olan veri int mValue; }; |
Yukarıdaki örnek kodun üzerinden geçer geçmez, bu sınıfın multithreaded ortamlar için uygun ve güvenli olmadığını anlamışsınızdır. Normal şartlarda std::mutex ve benzeri yapıları kullanarak bunu güvenli hale getirebiliriz. Şimdi, bu kodu atomik tipleri kullanarak nasıl güvenli hale getirebileceğimize bakalım.
Öncelikli olarak atomik tipler de, yukarıda bahsettiğim sınıflar gibi şablon bir sınıf (template class). Kullanabilmek için <atomic> başlık dosyasını eklemeniz gerekiyor. Bu sınıfın şablon parametresi olarak da paylaşmak istediğiniz veri tipini giriyorsunuz (kütüphane içerisinde bilindik veri tipleri için hazır tipler mevcut. Bu yapının alt tarafta kullandığı senkronizasyon mekanizması, ilgili kütüphane gerçeklemesine ve parametre olarak geçirilen tipe bağlı. Basit veri tipleri için, ör. int, long, float, bool, vb., std::mutex ve benzeri yapılardan çok daha performanslı ve “lock-free” şekilde erişim sağlanabilir (tabi burada “lock-free” olması işlemci tarafından sunulan işlemci komutlarına bağlı). Eğer daha karmaşık tipler kullanır iseniz de, sistem, arka tarafta std::mutex’leri kullanarak gerekli senkronizasyon işlevini yerine getiriyor. Bu arada “lock-free” desteği ayrıca sunulan is_lock_free() API’is ile de kontrol edilebilir. https://en.cppreference.com/w/cpp/atomic/atomic/is_lock_free sayfasından aldığım aşağıdaki örnek kod ile devam edelim:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
#include <iostream> #include <utility> #include <atomic> struct A { int a[100]; }; struct B { int x; int y; }; int main() { std::cout << std::boolalpha << "std::atomic<A> is lock free? " << std::atomic<A>{}.is_lock_free() << '\n' << "std::atomic<B> is lock free? " << std::atomic<B>{}.is_lock_free() << '\n'; } |
Bu sınıf tarafından sunulan API’ler store() ve load() metotlarıdır. Bunlar ilgili verilere erişim ve güncelleme için kullanabilirler. Aynı zaman atama operatörü de kullanılabilir. Bir diğer kullanışlı API ise exchange()’dir, bu API verilen parametreyi ilgili atomik değişkene atar ve önceki değeri döner. Son olarak kullanabileceğiniz iki API daha var. Bunlar compare_exchange_weak() ve compare_exchance_strong(). Bunlar ise değişkene veri atama işini sadece verilen değer mevcut değere eşit ise yapar. Son üç API, genelde “lock-free” algoritmalar ve veri yapılarında sıklık ile kullanılır (umarım bu konu ile ilgili de bir yazı sizler ile paylaşacağım). Ayrıca bütün tam sayı tipleri için ++, –, fetch_add, fetch_sub operatör ve API’leri de tanımlıdır (tam liste için https://en.cppreference.com/w/cpp/atomic/atomic’e başvurabilirsiniz).
Şimdi, yukarıdaki sınıfımız std::atomic’i kullanarak güvenli hale getirelim:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |
#include <atomic> class ShredCounter { public: void increment() { ++mValue; } void decrement() { --mValue; } int get() { return mValue.load(); } void set(int newValue) { mValue.store(newValue); } private: // Thread'ler tarafından paylaşılacak değişken std::atomic<int> mValue; }; |
Kanaatimce, atomiklerin en büyük avantajı, basit tipler için performans ve okunabilirlik. Bu sebeple, özellikle basit veri tipleri için olabildiğince std::atomics’leri kullanmanızı tavsiye ediyorum.
C++ 20 ile birlikte bu tiplere bazı eklemeler de yapıldı. Artık std::shared_ptr ve weak_ptr’da atomik olarak kullanılabilecek. Detaylı bilgi için şu sayfaya göz atabilirsiniz: https://en.cppreference.com/w/cpp/atomic/atomic.
Bu arada, atomik’ler ile ilgili bir diğer konu da bellek sıralaması (https://en.cppreference.com/w/cpp/atomic/memory_order) ki ben bu konuya girmedim. İlgili referans dokümanda da özetlendiği gibi, bu mekanizma, atomik ve önceki/sonraki işlemci komutlarının nasıl sıralandığını tanımlıyor. Bu konu ile ilgili daha detaylı bilgi almak için bahsettiğim sayfaya göz atabilirsiniz.
Bir sonraki yazımda görüşmek dileğiyle 🙂
Referanslar:
- https://thispointer.com/c11-multithreading-part-9-stdasync-tutorial-example/
- https://en.cppreference.com/w/cpp/atomic
- https://www.developerfusion.com/article/138018/memory-ordering-for-atomic-operations-in-c0x/
- https://bartoszmilewski.com/2008/12/01/c-atomics-and-memory-ordering/
- http://scottmeyers.blogspot.com/2013/03/stdfutures-from-stdasync-arent-special.html
- http://www.modernescpp.com/index.php/promise-and-future
- https://en.cppreference.com/w/cpp/atomic/atomic
- https://en.cppreference.com/w/cpp/atomic/memory_order